A dredging project consists of a series of phases – dislodging, raising, transport and placement of sediments. Throughout each of these phases, the opportunity is there to drive sustainability in operations.

Innovation, equipment and technology
Evolving, modernising and innovating
Traditionally, the main focus of dredging contractors and clients was on the economic aspect of sustainable development, utilising equipment and technology in the most cost-effective manner possible. Now, to address all elements of sustainable development, the Dredging for Sustainable Infrastructure philosophy encourages contractors to take an innovative approach, choose equipment carefully and utilise modern technology.

Project phases
The first phase of a dredging cycle is dislodging of the in-situ material. This dislodging process is essential, as removing the whole volume en-masse is impossible. The excavation process can be relatively simple in the case of soft sediments, but sometimes, where the removal of hard rock is concerned, it can be difficult. Dislodging is generally carried out by a cutting device such as cutterhead, draghead or the cutting edge of a bucket. Sometimes water jets are used for this purpose.
During the second phase of a dredging cycle, the dislodged material is raised. This can be done either mechanically or hydraulically. Using the mechanical alternative, the material is raised in a grab or bucket (e.g. backhoe or bucket ladder dredgers). In the second case, hydraulic dredgers (e.g. suction, cutter suction, trailing suction hopper dredgers) use a suction pipe. The dislodged material is then sucked into the suction mouth by means of a centrifugal pump. The material is further raised through the suction pipe towards the pump and, from there, through the discharge line to the deck of the dredger.
The third phase of the dredging cycle is the horizontal transport of the excavated and raised material from the dredging area to the site for further treatment or final relocation. This can be achieved mainly by one of three methods: hydraulic pipeline transport, transport by hopper dredgers or transport by barges.
Each method is linked primarily to a certain type of dredger. Barge transport is generally selected for mechanical excavation, while pipeline transport is used mainly with hydraulic dredgers, with the exception of hopper dredgers which are designed to load hydraulically. Of course, other types of transport exist, such as truck or conveyor belt transport, but to date their application in the dredging industry has been limited.
The final phase of a dredging sequence is the relocation of the excavated material to its final destination or to an intermediate site for further treatment. There are numerous options at this phase: reclamation of a site, beach nourishment, wetland creation, relocation on land, relocation in a pit, relocation at sea (underwater) and relocation to a contained site.
To ensure maximum sustainability, understanding project criteria – environmental, social and economic - should be the starting point. This will determine how to approach the project in a sustainable manner and, ultimately, inform what type of equipment should be used.
Project criteria
The selection of dredging plant and dredging methodology for a specific project depends on several factors, including:
-
The physical characteristics and quantity of the soils and rocks to be dredged;
-
The physical characteristics of the material after dredging, in respect of requirements of the placement option;
-
The location and the accessibility of the dredging area;
-
The location and distance of the site to which the material is to be transported (on land and/or offshore);
-
Local conditions (currents, wave climate, shipping, water depth, tidal range, dredge depth);
-
The production required (time schedule);
-
Financial constraints;
-
Environmental constraints;
-
Contractual or technical specifications of future users of the site(s); and
-
The types of dredgers available locally, regionally or even worldwide.
In addition to these considerations, project-related criteria must be taken into account. These criteria include the design of a project, execution period and working conditions, amount to be dredged and execution time and various legal, regulatory or environmental restrictions. To achieve the balance required under the Dredging for Sustainable Infrastructure philosophy, environmental, social and economic criteria are central.
Environmental criteria
Environmental conditions and sensitivity at dredging and placement sites is paramount. As dredging, by definition, will have an impact on the environment, meaning that the choice of equipment will go a long way in determining the impact of operations.
For instance, some forms marine life is sensitive to short term, high stresses, while others are more seriously affected by longer term exposure, even at a lower level. Such knowledge will influence the choice between dredgers with a high output, which can perform the works in a short period, or lower output dredgers, which take longer to complete the works. Decisions in this matter need to be based on appropriate environmental mapping and be supported by numerical modelling or by other quantification tools.
Contamination level of sediments, too, is an important criteria. If the dredged sediment contains certain levels of contaminants, special dredgers or specifically-modified dredgers might be required to achieve the specified thresholds of contaminant release.
Social criteria
The presence and operations of dredgers can cause disturbance to communities around the project areas. These disturbances can be caused by visual impact, sound, emissions and interference with recreational or commercial traffic. Although on the other hand, the presence of dredgers, and of the related activities, can also encourage visitors to observe the project, which might directly or indirectly stimulate local economies. Occasionally, some dredging projects are even accompanied by initiatives and visitor centres that disseminate the project details to the public, which gives rise to a better understanding of the way dredging projects can benefit an area.
If possible, these social effects might be included in the process of dredger selection and in the operational planning.
Economic criteria
Selection of the optimal dredger, while clearly beneficial, is dependent on the availability of dredgers. The best dredger is not always available in the project area, in the requested time frame, or can only be made available at excessive cost. In such situations, the ‘best available’ dredger should be selected - and in many cases, the operational output of that dredger can be supported, by other actions or measures, to overcome initial disadvantages, for instance, by adding booster pumping stations if the excavating dredger does not have enough pumping power to reach the placement site.
The total cost of a suitable dredger, including costs of further process-related actions and supportive works, is of course another major decisive factor in the selection process. It is important not only to consider the cost of the dredger to be selected, but to include all costs for material transport, placement, (environmental) monitoring and mitigation, and all other normal project management-related costs.
Technological criteria
Once the project criteria are fully understood, the important decisions relating to the equipment used (particularly the dredger itself), and the methods by which it will be used, need to be made. Mobilising equipment is a costly and carbon-intensive undertaking, so detailed planning is vital. For the dredging vessels themselves, the choice is between hydraulic and mechanical dredgers.
Hydraulic dredgers
Hydraulic dredgers include all dredging equipment that makes use of centrifugal pumps for the transport process. In short, there is only one type of purely hydraulic dredgers, the stationary Suction Dredger. Other dredgers using hydraulic systems, apply mechanical power for part of the excavation activity. As the Suction Dredger is not commonly used for environmentally-sensitive projects, as it is associated with an increase in turbidity, sound generation, output rate (due to use of barges) and creation of loose dislodged residue layers, it is not often recommended under the principles of Dredging for Sustainable Infrastructure. Instead, mechanical/hydraulic hybrid dredgers are generally chosen.
Mechanical/hydraulic dredgers: the technology
There are four main types of dredging vessel generally used today that fall under this category: Cutter Suction Dredgers, Trailer Suction Hopper Dredgers, Backhoe Dredgers and Grab Dredgers.
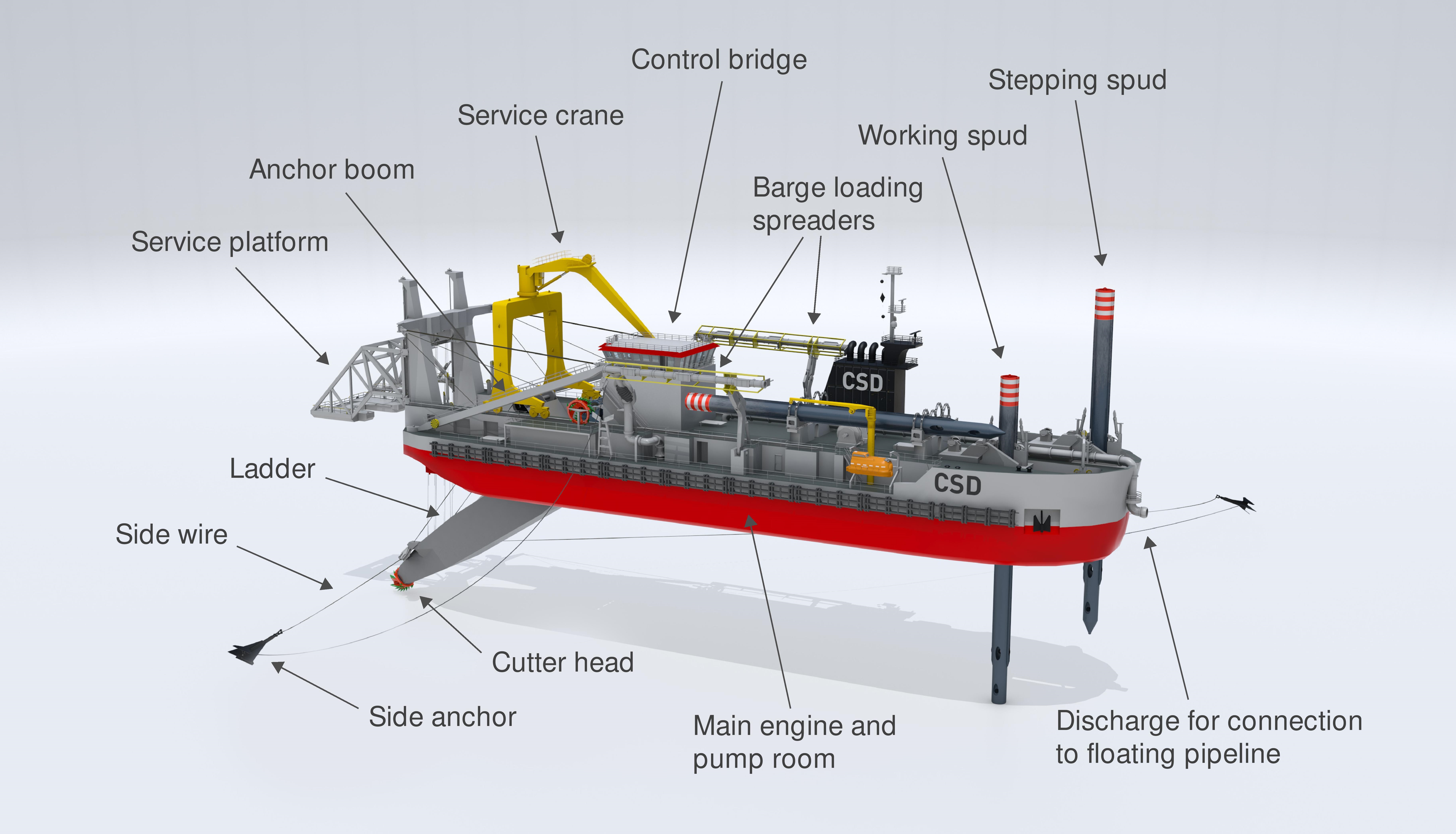
The CSD dislodges the material with a rotating cutter equipped with cutting teeth. The loosened material is sucked into the suction mouth, located in the cutterhead, by means of a centrifugal pump installed on the pontoon or ladder of the dredger. Further transport of the material to the relocation site is achieved by hydraulic transport through a discharge pipeline (partly floating, partly land-based, sometimes submerged). Occasionally the material can be pumped into transport barges for further transport.
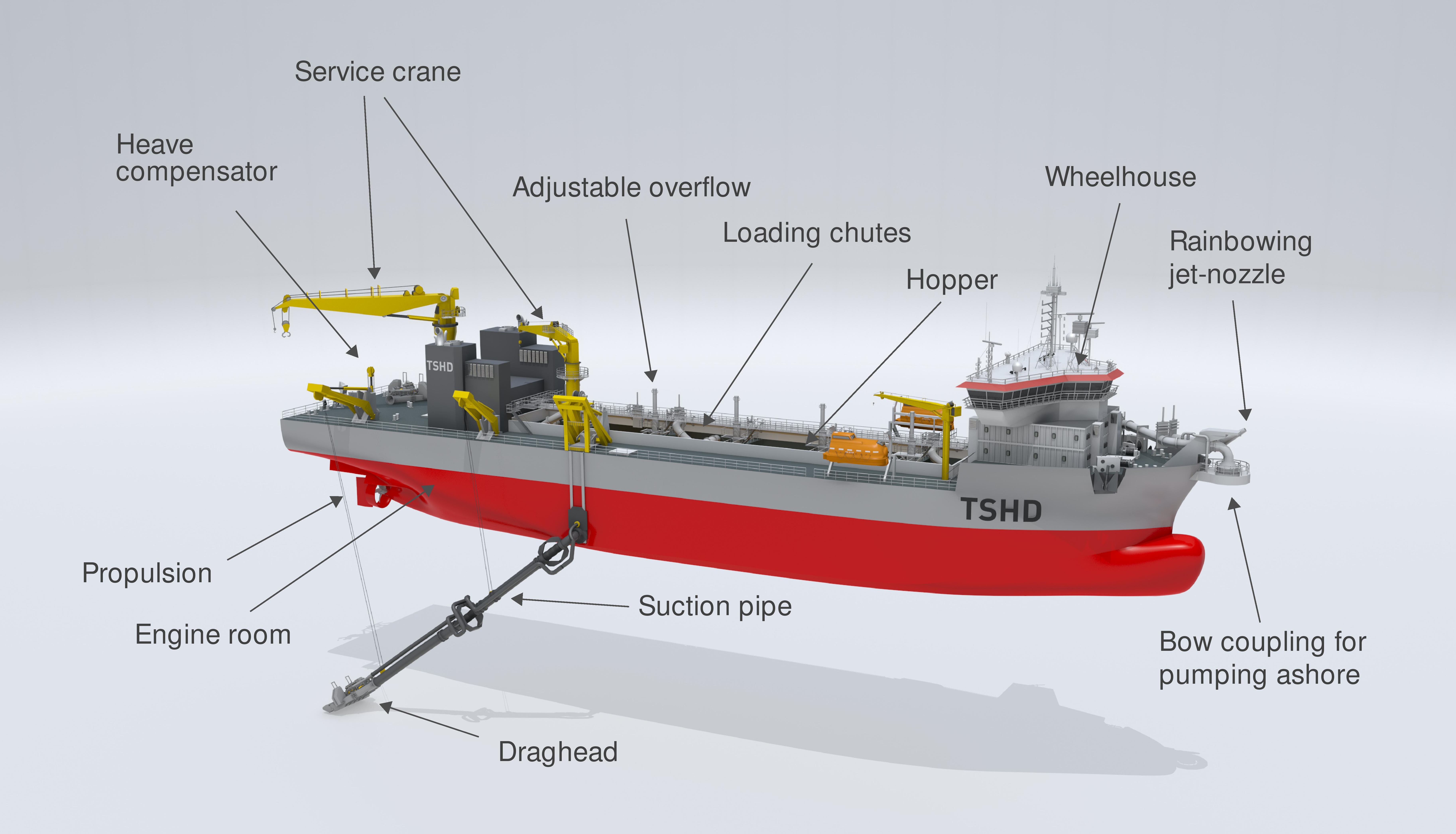
The TSHD is a normal inland-waters- or sea-going ship equipped with a suction pipe. At the end of the suction pipe is a draghead, which can be lowered onto the seabed while the TSHD navigates at a reduced speed. Most TSHDs have twin-screw propulsion and powerful bow thrusters, which provide a high degree of manoeuvrability. During the forward movement of the TSHD, the draghead agitates a thin layer of the seabed. The loosened material, together with some water as transport medium, is sucked into the suction pipe by means of a centrifugal pump, which is installed in the vessel’s hull or on the suction pipe.
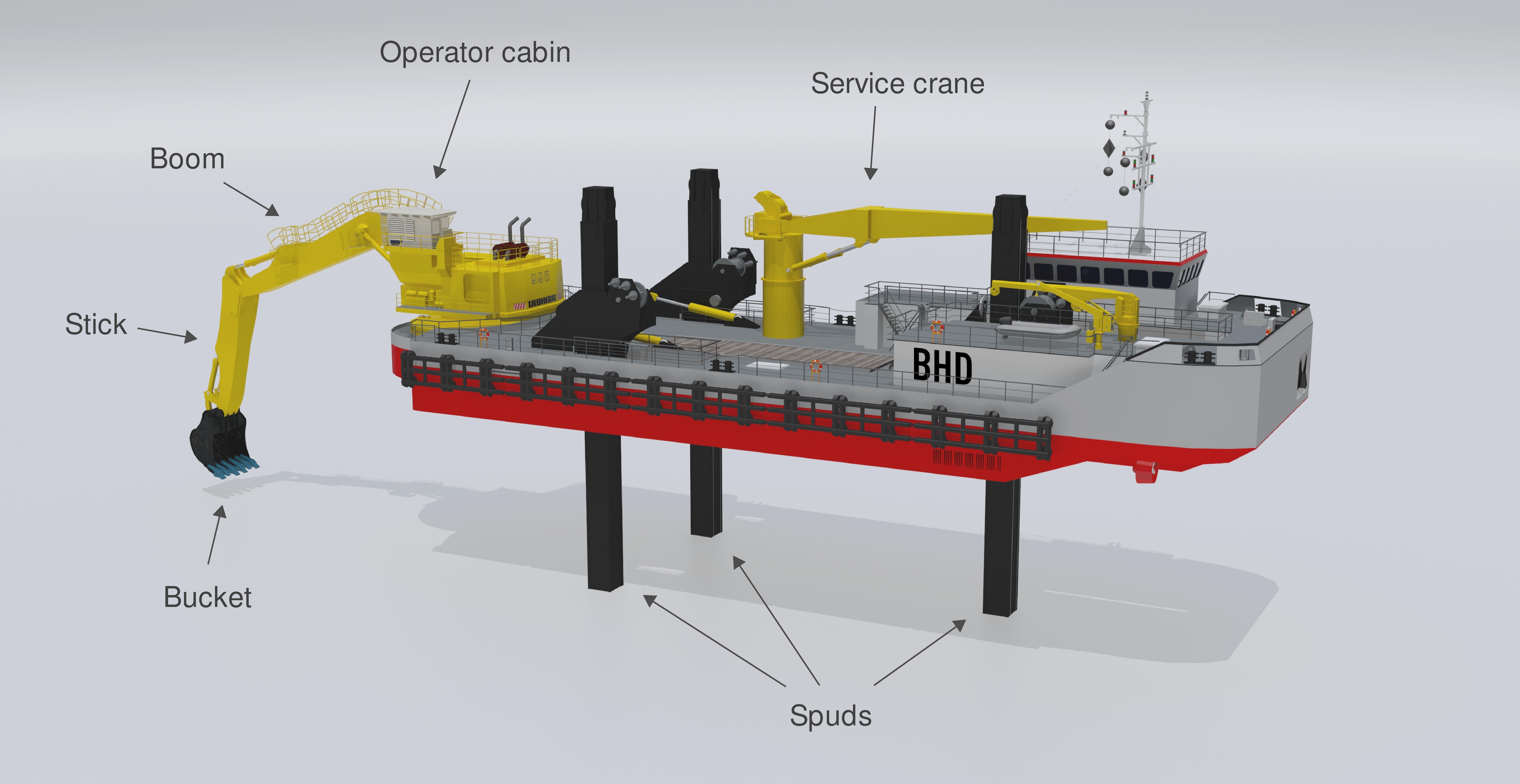
The BHD is essentially a hydraulic excavator mounted on a pontoon equipped with a spud carriage system. Whereas the conventional land-based hydraulic excavator is normally mounted on a tracked or wheeled undercarriage, the dedicated dredging machine usually is mounted on a fabricated pedestal at one extremity of a spud-rigged pontoon.
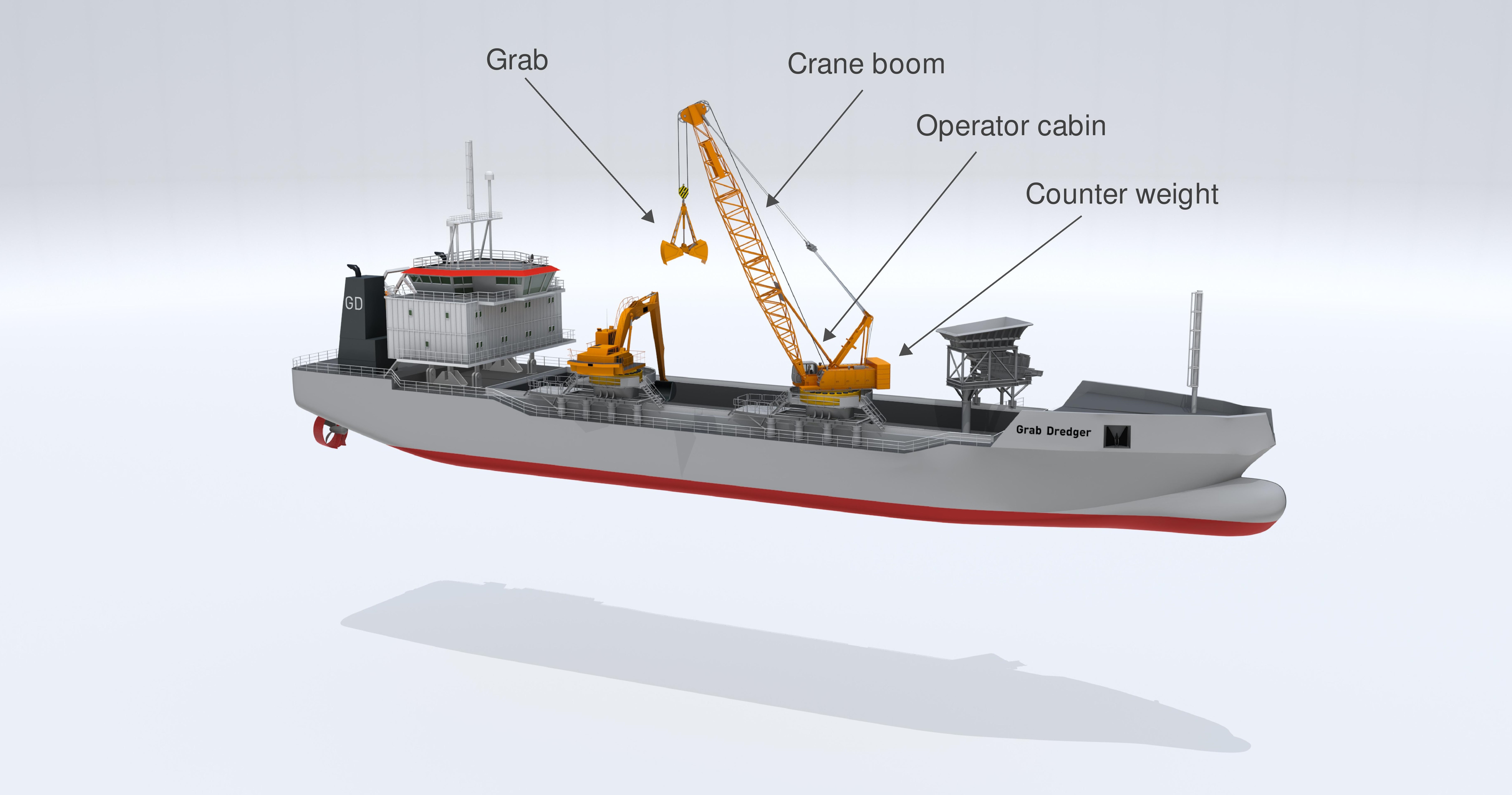
Sometimes called clamshells, these dredgers can exist in pontoon or self-propelled forms. The GD is basically a conventional cable crane mounted on a vessel. The bed material is excavated by the grab of the crane and raised by the hoisting movement of the cable. Once above water, the crane arm swings and the material is loaded into its own hopper for the grab hopper dredger, or in a transport barge for the grab pontoon dredger.
At the relocation site the material is discharged, either through the bottom doors or through the split hull of the dredger or transport barge, mechanically unloaded, or pumped ashore by means of a barge-unloading system.
Mechanical/hydraulic dredgers: environmental risks and mitigation
The use of each piece of dredging equipment comes with its own environmental risks. In the Dredging for Sustainable Infrastructure approach, each of these risks should be recognised and mitigated as far as possible. Some of these risks are common to each type of equipment and others are specific to a particular type.
Cutter Suction Dredger (CSD):
Owing to the rotating cutter, there is a potential risk of creating additional suspended sediments at the dredging site. The swing speed of the ladder and the rotating speed of the cutter are significant variables in this respect. Careful selection of these values is important in order to reduce these effects.
Most CSDs do not have an optimal combination of cutting capacity and suction capacity for all types of soil. The type of cutterhead may make a significant difference in the amount of dislodged residue left. Depending on the cutting performances required, the optimal cutterhead is usually selected, which, if properly operated, also produces the least residue material.
Good accuracy can be obtained because the movement of the dredging head is controlled from a fixed point (the working spud). Vertical accuracies down to 10-15 cm are feasible, although, at full productivity, the accuracy level will depend on the soil characteristics and will be approximately 25 cm or more.
For optimal use of the CSD, the complete height of the cutter should be utilised for cutting purposes. This means that the minimum layer thickness (1 to 3 m depending on the size of the cutterhead) is often greater than the layer thickness which needs to be removed, especially in the case of selective dredging.
Owing to the hydraulic character of the transport, water is added to the soil for transportation purposes. Depending on the soil type and the attainable layer thickness, the amount of added water varies significantly. It should be noted that dilution can be reduced by an under-dimensioned cutting power, compared to the pumping power, but this will increase the dislodged residue layer effect. An optimum has to be found for each individual project.
Generally, the CSD has a powerful engine, which generates a high sound level in air. Given that the CSD is a stationary vessel, which often works in populated areas, the dredger can be a continuous source of significant sound levels. Precautions, such as low-sound engines, sound tempering covers and procedures to keep the engine room closed under any circumstance, are possible.
The emissions of a CSD are a function of the energy consumption, which is strongly influenced by resistance the cutter encounters and by the transport distance of the soils dredged, whether it be transport due to pumping or transport by barges. The main to mitigate emissions is through the use of newer LNG-powered or hybrid vessels, though these remain relatively uncommon.
Trailer Suction Hopper Dredger (TSHD):
The actual cutting process creates less suspended sediments compared with a CSD as there is no rotating device in the draghead. However, there is a risk of overflow leading loss of fine materials and turbidity. Overflow (when a dredger is filled past capacity) can be limited or even prevented by stopping the dredging process earlier. This results in smaller loads in the hopper, leading to lower cycle productions and consequently to higher dredging costs. To maximise sustainability, a balance must be struck.
Because the cutting process is basically a scratching action, only limited amounts of soil are loosened. Consequently, most of the material is picked up by the suction process without leaving a dislodged residue layer. Larger residue layers can be generated by the settlement of large quantities of overflowing fine-grained material that settles in a fluid mud layer on the bottom after a certain time.
The accuracy of the dredging depth is low compared with the CSD, owing to the fact that the position of the suction pipe is flexible and more difficult to control. At best a vertical accuracy of approximately 15-25cm can be obtained, provided sophisticated monitoring and steering equipment and automation and control systems are used.
The cutting process is strictly horizontal. As such, the mixing of soil layers can be controlled fairly accurately. However, taking into account the lower accuracy level compared with the CSD, the TSHD is not especially suited to accurate removal of thin layers of (contaminated) material.
Significant amounts of water are added during the suction process. With modern monitoring and control equipment, this amount can be limited. Where the pump-ashore facility is used, an additional volume of water has to be mixed with the dredged material to facilitate pipeline transport.
The TSHD is equipped with powerful engines generating significant sound levels, although the sound level is reduced to acceptable levels at a distance of a few hundred metres. As the TSHD generally operates in more distant areas sound generation is less of an issue.
As is the case with all traditionally-fuelled vessels, emissions are associated with energy consumption. In addition to the energy spent on actual dredging (strongly influenced by soil type and dredging depth), the total time needed to load a full hopper, and the time spent on sailing from dredging area to the placement location, and back, dominate the total exhaust emission. When pumping ashore has to be made, this also contributes to the total releases. Contrary to stationary dredgers, emissions are made at various locations, and along the sailing routes.
Backhoe Dredger (BHD):
Problems encountered with the backhoe relate to the position of its bucket while being raised; the operator must give full attention to keeping the bucket in an optimal horizontal position in order to prevent excessive spillage. Closed buckets that limit spill are sometimes available.
The cutting face of the backhoe is the edge the bucket. Almost all the soil loosened by the bucket is carried away, leaving a clean surface. A minor risk of a dislodged residue layer remains if there is excessive spillage while the material is being raised.
The accuracy of a traditional backhoe is relatively low, as the excavating bucket has to be repositioned at every cycle. Without sophisticated monitoring equipment, an accurate dredging depth is impossible. However, such monitoring systems exist and are now implemented on a routine basis for larger backhoes. Accuracy down to 10cm is attainable, albeit with reduced productivity.
Thin layers can be excavated selectively, provided a good monitoring and control system is available.
Backhoes require the use of transportation barges, which come with their own sound generation. Production of underwater sounds by these mechanical dredges depends on the dredging cycle, including the availability of barges. In general, they produce relatively low frequency sounds. Tugboats, or other equipment that move the barges, produce underwater sound when manoeuvring and sailing.
Emissions by backhoe dredging are determined by the power needed to actually dredge the material (influenced by hardness of the soil, excavation profile and water depth), plus the emissions by sailing of the transportation barges (influenced by distance and barge load efficiency)and those generated by the barge unloading spread.
Grab Dredger (GD):
The problem here is similar to that of the BHD. Closed grabs, although not often used, can effectively reduce generation of suspended sediment during lifting of the grab.
Because the GD uses a mechanical cutting process to scrape the material from the bed, only a thin spill layer is left.
The accuracy of the GD is limited because the excavating bucket has to be repositioned at every cycle. Without sophisticated monitoring equipment, precise positioning is impossible. Monitoring systems and special-purpose grabs allow vertical accuracies of around 0.35 to 0.50 m. Horizontal accuracy is poor, especially in deep waters and in water currents where a pendulum effect occurs, except for the grabs equipped with an active ROV steering system.
With a traditional GD it is difficult to achieve a horizontal cut as the excavation depth of each cycle cannot be kept under control. Therefore, mixing different layers cannot be avoided. Recently, new bucket types and monitoring and control systems have been developed with improved characteristics in this respect.
The situation here is again similar to that with the BHD. Where hydraulic unloading of the transport barges takes place, there is a need for transport water.
Production of underwater sounds by these mechanical dredges depends on the dredging cycle, including the availability of barges. In general, they are deemed to produce relatively low frequency sounds. However, tugboats, or other equipment that move the barges, produce underwater sound when manoeuvring and sailing.
Emissions by GD dredging are determined by the power needed to actually dredge the material (influenced by hardness of the soil, excavation profile and water depth), plus the emissions by sailing of the transportation barges (influenced by distance and barge load efficiency) and those generated by the barge unloading spread.
Technological innovation
Once the project criteria and the equipment needed are known, contractors and clients will have detailed understanding of how to undertake a project in the most sustainable, safe, cost-effective and efficient manner. Now, there is an opportunity to take advantage of new innovate technologies and methods to further drive sustainability.
Several technological advancements in dredging equipment and techniques are now helping to reduce environmental impacts, increase operational efficiency, and improve the safety and reliability of dredging projects.
Energy-efficient equipment
Dredging contractors are increasingly investing in energy-efficient vessels and equipment with the aim of eventually phasing out fossil fuels. While this is an ongoing process, as most vessels have a 20-30 year lifespan and represent a major investment, newer vessels are often LNG-powered or incorporate battery technology.
Remote operation
Remote operation is increasingly being used by dredging contractors to improve safety, efficiency and precision, as well as to drive down costs. ROVs and similar technology is a relatively new development within the dredging industry, as well as the wider marine sector, but the benefits are clear.
This technology can be used to survey and map the seabed through the use of sonar systems, cameras, and other sensors. They can also be used to inspect equipment like cutter heads, pumps and pipelines.
For environmental monitoring, too, remote operation can play an important role, allowing for the measurement of turbidity and the status of the water plume.
Digitalisation
By integrating sensors and monitoring equipment into dredging machinery, operators can collect real-time data on dredging conditions, sediment quality, and environmental parameters. This data can be analysed to optimise dredging processes, minimise resource use and reduce waste.
Geographical information systems (GIS) and 3D mapping technologies, for example, allow for detailed, real-time mapping of the seabed and sediment layers. These maps allow operators to precisely plan and execute dredging operations, reducing the risk of over-dredging and limiting environmental disruption.
Additionally, ‘big data’ analytics can be used to predict and model the environmental impacts of dredging projects, enabling operators to make data-driven decisions that prioritise sustainability. This can include assessing the potential effects on marine life, water quality, and coastal ecosystems before the dredging work begins, ensuring that all necessary precautions are taken to mitigate harm.
Environmental monitoring tools
One of the most innovative ways to ensure sustainable dredging practices is through enhanced environmental monitoring and impact assessment tools. New technologies in remote sensing, such as satellite imagery and underwater drones, allow dredging companies to continuously monitor the environmental conditions of the dredging site. By providing real-time information on water quality, sediment suspension, and biodiversity, these tools help operators adjust their activities to avoid significant ecological damage.
Related stories
Innovation, equipment and technology Solutions in dredging
.jpg)


Principles of Dredging for
Sustainable Infrastructure
Together for the future of our planet